Technology
Kiteshield combines cutting-edge hardware and software to deliver reliable safety in harsh industrial environments, with underground mining as the first application.
System Architecture
The Kiteshield system consists of an offboard and an onboard part. The offboard system includes one or more high-integrity safety control units - similar to those used in airplane control systems - together with a network of UWB anchors. Non-safety-critical functions such as the operator control station and external API run on redundant COTS servers.
On each machine, the onboard system consists of a UWB tag and a safety control unit that actuates the emergency brake system when required.
Radio Technology
Kiteshield uses Ultra-Wideband (UWB) radio for high-precision positioning. By measuring the time-of-flight of radio signals at the speed of light, the system determines a bounded volume in which the tag must exist with absolute certainty. A critical property of this approach is that speed-of-light measurements cannot be measured too short - they can only be measured too long - which means the system will never underestimate the distance to a machine.
A combination of multiple measurements yields this proven localization volume - a small region that is guaranteed to contain the tag.
- Works reliably in challenging environments with dust, moisture, and reflective surfaces
- No dependency on GPS or external positioning infrastructure
- Enables real-time dynamic geofencing around machines and personnel
Dynamic Geofencing
Each machine - both manual and automated - is surrounded by a virtual protective shield: the proven localization volume in which the machine is able to reach a complete stop. This shield follows the machine through fast and repeated recalculation, forming a dynamic geofence around it.
This enables full mixed traffic support. When two machines approach each other, the system detects overlapping protective volumes and triggers a stop. Machines can also safely pass each other at designated meeting areas in the mine.
- Manual mode - no automated machines operating
- Automated mode - no manual machines operating
- Mixed mode - both automated and manual machines operate simultaneously
Programming Language
The entire system is built in Rust, chosen for its memory safety guarantees and suitability for safety-critical applications. Rust eliminates entire classes of bugs - such as null pointer dereferences, buffer overflows, and data races - at compile time, providing a strong foundation for software that must not fail.
- Supported by Ferrocene, a qualified Rust compiler for safety-critical systems (IEC 61508 SIL 4, ISO 26262 ASIL-D)
- Enables formal reasoning about software correctness
- Active open-source ecosystem with strong tooling
Infrastructure-Based System
The positioning infrastructure consists of a network of UWB anchors distributed throughout the mine. Each anchor cable contains an anchor every 30 meters, with 250 meters of infrastructure per anchor cable assembly. A standard installation runs two cables per tunnel, one on each side. This design allows rapid deployment - approximately two hours per kilometer - at low infrastructure cost compared to existing solutions.
- Simple splicing for field repair procedures
- No complex per-anchor configuration or calibration
- Scales to cover entire mine networks

A worker zip ties the anchor cable onto existing rock bolts or other infrastructure such as cable ladders - no specialized tools required.
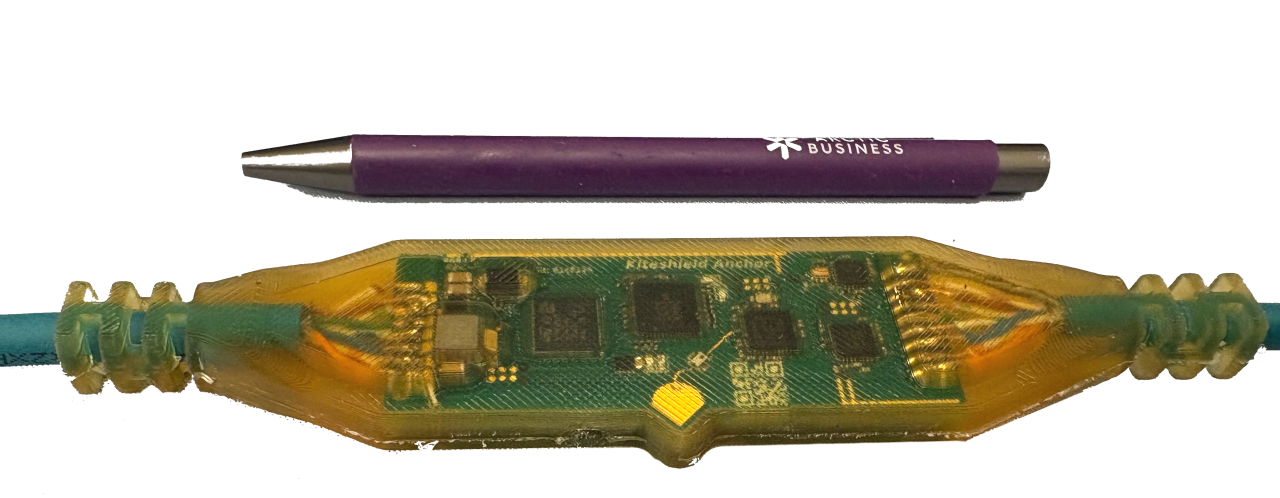
Hardened Electronics
Harsh industrial environments subject electronics to extreme conditions: moisture, dust, chemical exposure, and repeated blasting shocks. Kiteshield anchors use an overmolding technique that encases the electronics in a seamless protective shell, eliminating joints and seams where contaminants could enter.
- Integrated strain-relief prevents cable damage from mechanical stress
- Shock absorption protects components during blasting operations
- Minimizes long-term maintenance and replacement costs
Integrations
Kiteshield provides a fully open API with real-time data from the safety system, enabling integration with existing operations management and automation platforms.
- Area data - current area state, number of checked-in manual and automated machines
- Entity data - estimated position, proven localization volume, threat information, entity mode and state
- Raw data - anchor positions and measured UWB distances